
はじめまして、大霜です。
ugo Proとugo Rには2本のアームが搭載されています。この2本のアームと顔によってugoは人に似て、親しみやすいロボットになっているのではないかと考えています。
今回はそんなアームについてご紹介します。
ロボットアームについて
ugoのアームについて話す前に「ロボットアーム」について話そうと思います。ロボットアームは工学分野では一般に「マニピュレータ」と呼ばれます。
マニピュレータは構造によって複数の種類に分けることができます。少し例を挙げると、
- xyz軸方向にスライドする機構をもつ直角座標形式の直角座標ロボット
- 動作機構が円筒座標系である円筒座標ロボット
- 動作機構が関節によって構成される関節ロボット
などがあります。
では、ugoはどのような分類になるかというと、上記に挙げたものの中では関節ロボットというのがあてはまりそうです。
しかしugoのアームは1つではありません。アームが2本あるようなロボットのことを一般に双腕ロボットといいますのでこれをふまえると双腕関節ロボットということができるかなと思います。
ugoの自由度について
ロボットアームを説明する上で知っておくべき要素のひとつとして「自由度」というものがあります。ロボットアームにおける自由度とは運動を表現するのに必要な変数の数のことをいい、大雑把に行ってしまえば関節の数だと考えていいと思います。
自由度とは、なにもロボットアームに使われるだけの言葉ではなく、物体の状態を表現するときにも使われます。3次元空間において物体を表現するのに必要な数は以下のようになっており、

①X軸の自由度、②Y軸の自由度、③Z軸の自由度、④X軸の回転自由度、⑤Y軸の回転自由度、⑥Z軸の回転自由度
の6つがあります。これを踏まえるとロボットアームは6つの自由度があれば動作可能な範囲ではすべての場所に好きな姿勢で作業を行うことができるということになります。
では弊社のロボットugoのアームの自由度はいくつかといいますと以下のような7つになります。
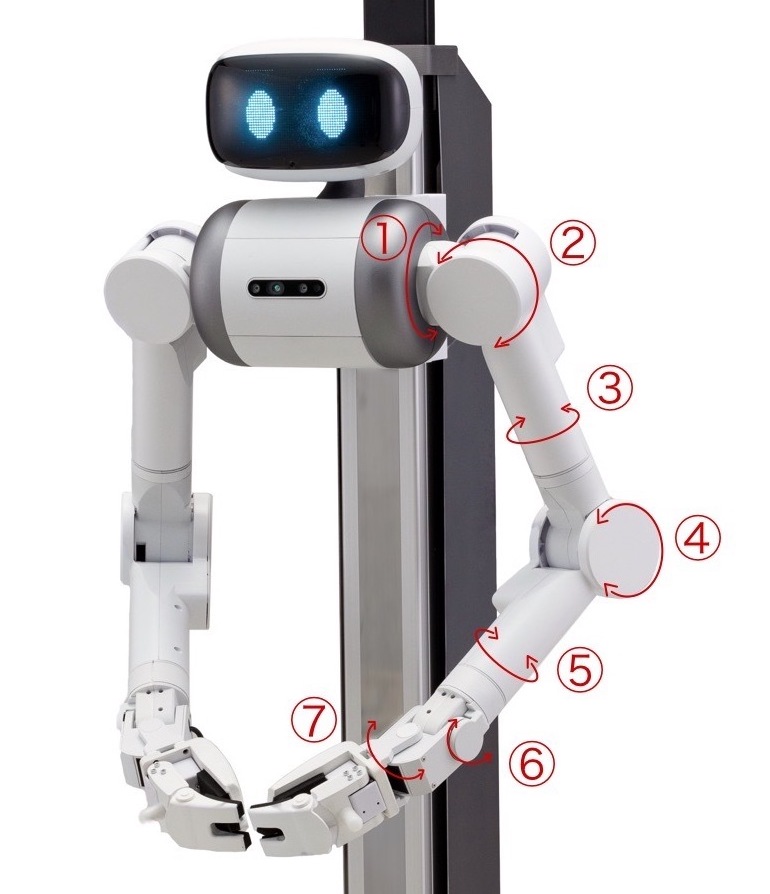
3次元空間で自由度は6つでいいという話をしたのに7つ?と思った方もいらっしゃると思うのですが7つあることで1つ自由度に余裕があることで手の姿勢と座標を変えずに複数の姿勢を行うことができるというメリットが生まれるのです。
このような6よりも多い自由度のことを冗長自由度といいます。もちろん冗長にするということは制御するモータの数が増えるということで制御が難しくなるという意味でもあります。
ugoのアームと人間の腕
ugoは双腕関節ロボットだと初めの項目で書きましたが、これは人っぽさを増す大きな要素だと思っています。人に似たロボットだからこそ、人とは違う動きをすると大きな違和感を生んでしまいます。
先ほどugoのアームの自由度の話をしましたが、人間の腕の自由度について考えたことはあるでしょうか?
人間の自由度は、肩に2自由度、上腕に1自由度、肘に1自由度、前腕に1自由度、手首に2自由度の合計7自由度です。ugoは人の腕を参考にして自由度が決められているので人と似た動きで親しみやすい姿になっていると思います。
ugoでは、一緒にロボットを社会実装していく仲間を絶賛募集中です。
詳しくはこちら👇まで。