こんにちは。樋詰です。
今回は、前回に引き続きモーターについてのお話です。
前回はモーターの進化についてお話ししましたが、今回はロボットへの適用を考察します。
このモーター、ここに使えるかな?
ある目的のためにモーターを選定していると「これ、使えるかな?」という場面ありますよね?
とりあえず使ってみて、上手く動けばOK、ダメだったら大きなモーターで再度トライする・・・というやり方でも、とりあえず前には進めます。
きっちり計算しようとしても電気回路の設計などと比べると趣が異なるし、モーターの教科書には実用的なことは書いてないし・・・などなど、ちょっと取っ掛かり難いですね。
でも、次のように案外簡単な実験で分かります。
例題 このモーターでカート(台車)を動かせるか?
📌 カートの条件(これだけ分かれば、ほぼOK)
- カート質量 50 kg
- モーター 定格トルク1Nm、4個
- ホイール 直径10cm
- 摩擦係数 抗力を実測して求める
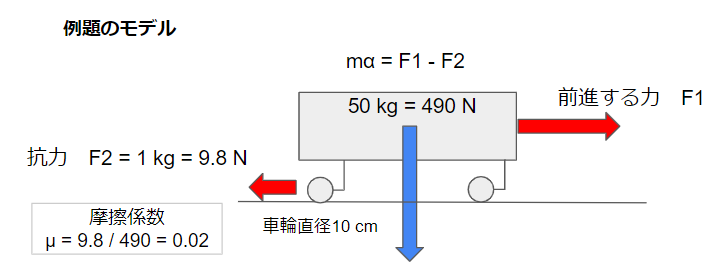
運動の第2法則
例題モデルの運動方程式を考えると:
となります。
ここで、抗力は転がり抵抗や摩擦によるもので、前進する力に対して逆向きに働きます。
方程式の左辺がマイナスでは前進出来ませんから、このカートを前進させる条件は:
抗力 を測る・・・
を測る・・・ との大小関係は大丈夫?
との大小関係は大丈夫?
プッシュプルゲージやバネばかりを使ってを測ります。
無限に緩慢に押す(引く)ことでカートが動き出したときの値です。学校で実験しましたね。
実測の結果は、1 kg = 9.8 N でした。
4つのモーターを合計した力が 9.8 Nを超えていれば動かせます。
このモーターの定格トルクは 1 Nmでした。あれれ、足りない・・・では、ありませんね(笑)むしろ余裕であることが分かります。ここで車輪の直径を使います。
摩擦係数も求まります。
発進時に必要なトルク を計算する
を計算する
モーター定格に対して余裕があります。
このことは、実測して得た性能線図からも良く分かります。

このカートの運動性能を予測すると
性能線図から次のように予測されます。なかなか俊敏です。
最高速度 と最大加速度
は:
また、このカートに50 kgのペイロードが加わったとしても、まだ大丈夫そうに見えますね。
走行テストの結果
実際に走行して得た速度や加速度などの諸元値は、性能線図から得た予想値と類似しています。

また、実測した電流値から抗力(摩擦係数)を計算すると、先のプッシュプルゲージでの測定結果と同じことも分かります。
ugoのデバイス評価
このように、ugoではデバイスの選定にあたり自分達で実験して仮説を実証するとともに、その実力を把握することに時間を使います。
重要な部品については意図的に定格を超える負荷を掛けて長時間テストします。デバイスが壊れるまでテストしてマージンを見極めたりもします。 デバイスのクセやバグを見つけてしまい使い方の工夫を迫られることもあります。
それら全てが設計マージンとなり、信頼性の向上に繋がっています。
ugoでは、一緒にロボットを社会実装していく仲間を絶賛募集中です。
詳しくはこちら👇まで。